随着国内机器人产业的发展壮大,工业机器人腰部、末端和肘、腕处等需要运动的部位,所使用的等截面薄壁轴承、交叉滚子轴承、谐波减速器轴承、谐波轴承、关节轴承越来越多地受到国内轴承生产企业的青睬。
同时,为了保证工业机器人能够可靠地完成生产中的工艺任务,保证工艺质量,工业机器人的定位精度和重复定位精度都很高。因此,提高和确保工业机械手的精度就需要采用rv减速器或谐波减速器。精密减速器在工业机械手中的另一作用是传递更大的扭矩。负载较大时,盲目增加伺服电机的功率不划算,在合适的转速范围内可以通过减速器增加输出扭矩。常见的工业机器人轴承有等截面薄壁轴承和交叉分析圆柱滚子通用轴承。
工业机器人交叉滚子轴承的特点:1、薄壁型轴承 2、高回转定位精度 3、可承受轴向、径向、倾覆等方向综合载荷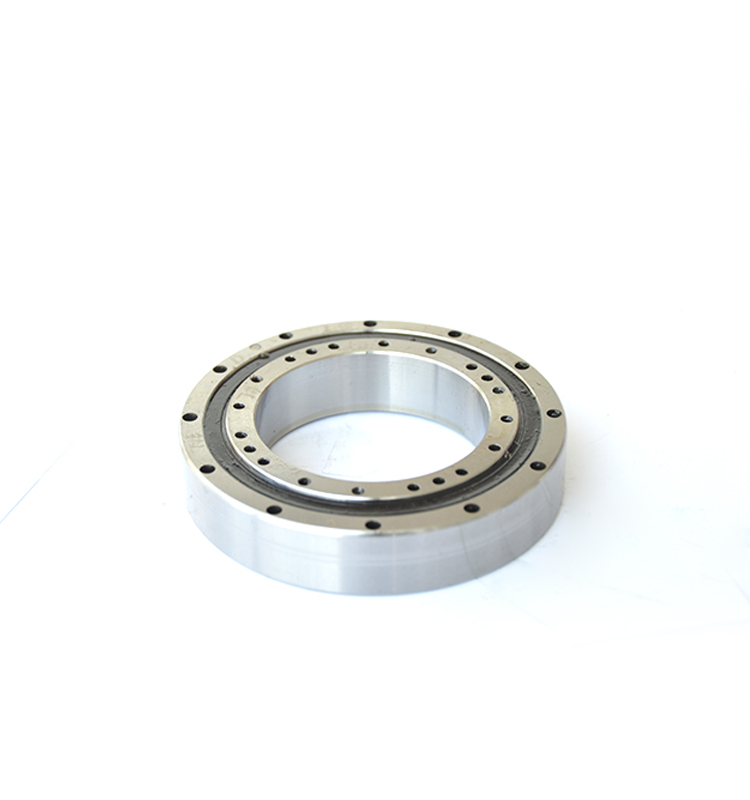
一、交叉滚子轴承结构特点:交叉滚子轴承,是圆柱滚子在呈90度的v形沟槽滚动面上通过隔离块被相互垂直地排列,所以交叉滚子轴承可承受径向负荷、轴向负荷及力矩负荷等多方向的负荷。内外圈的尺寸被小型化,极薄形式更是接近于极限的小型尺寸,并且具有高刚性,交叉滚子轴承精度可达到p2级。因此适合于工业机器人的关节部和旋转部、机械加工中心的旋转台,机械手旋转部、精密旋转工作台、医疗机器、计算器、ic制造装置等设备。
1、具有非常出色的旋转运动精度:交叉滚子轴承内部结构采用滚子呈90 相互垂直交叉排列(这也是交叉滚子轴承的名称由来),滚子之间装有间隔保持器或者隔离块,可以防止滚子的倾斜或滚子之间相互磨察,有效防止了旋转扭矩的增加。
2、操作安装简化:被分割成两部分的外环或者通过内环,在装入滚子和保持器后,被固定结合在一起,所以我们安装时操作能力非常具有简单。
3、承受较大的轴向和径向载荷:由于滚子通过垫片垂直排列在90 v形槽滚动面上,这种设计使十字滚子轴承能够承受大的径向载荷、轴向载荷和各个方向的力矩载荷。
4、大幅节省安装空间:交叉滚子轴承的内外环尺寸被最小限度地小型化,特别是超薄结构是接近极限的小型尺寸,并且具有高刚性,所以此轴承最适合于工业机器人的关节部位或者旋转部位、机械加工中心的旋转工作台、机械手旋转部、精密旋转工作台、医疗仪器、计量器具、ic制造装置等广泛用途。

